Motor Eléctrico, partes de un motor y tipos de motor “general”
Un motor eléctrico es un dispositivo rotativo que transforma energía eléctrica en energía mecánica. En diversas circunstancias presenta muchas ventajas respecto a los motores de combustiónA igual tamaño y peso son más reducidos. Se pueden construir de cualquier tamaño. Tiene un par de giro elevado y, según el tipo de motor, prácticamente constante. Su rendimiento es muy elevado (típicamente en torno al 80%, aumentando el mismo a medida que se incrementa la potencia de la máquina). La gran mayoría de los motores eléctricos son máquinas reversibles pudiendo operar como generadores, convirtiendo energía mecánica en eléctrica.
Partes de un Motor
Comenzemos mirando el diseño global de un motor eléctrico DC simple de 2 polos. Un motor simple tiene 6 partes, tal como se muestra en el diagrama:
Una armadura o rotor.
Un conmutador.
Cepillos.
Un eje.
Un Imán de campo.
Una fuente de poder DC de algún tipo.
Según la naturaleza de la corriente eléctrica transformada, los motores eléctricos se clasifican en motores de corriente continua, también denominada directa, motores de corriente alterna, que, a su vez, se agrupan, según su sistema de funcionamiento, en motores de inducción, motores sincrónicos y motores de colector. Tanto unos como otros disponen de todos los elementos comunes a las máquinas rotativas electromagnéticas.
Motores de corriente continua
La conversión de energía en un motor eléctrico se debe a la interacción entre una corriente eléctrica y un campo magnético. Un campo magnético, que se forma entre los dos polos Opuestos de un imán, es una región donde se ejerce una fuerza sobre determinados metales o sobre otros campos magnéticos. Un motor eléctrico aprovecha este tipo de fuerza para hacer girar un eje, transformándose así la energía eléctrica en movimiento mecánico.
Un ejemplo simple
Los dos componentes básicos de todo motor eléctrico son el rotor y el estator. El rotor es una pieza giratoria, un electroimán móvil, con varios salientes laterales, que llevan cada uno a su alrededor un bobinado por el que pasa la corriente eléctrica. El estator, situado alrededor del rotor, es un electroimán fijo, cubierto con un aislante. Al igual que el rotor, dispone de una serie de salientes con bobinados eléctricos por los que circula la corriente. Cuando se introduce una espira de hilo de cobre en un campo magnético y se conecta a una batería, la corriente pasa en un sentido por uno de sus lados y en sentido contrario por el lado opuesto. Así, sobre los dos lados de la espira se ejerce una fuerza, en uno de ellos hacia arriba y en el otro hacia abajo. Sí la espira de hilo va montada sobre el eje metálico, empieza a dar vueltas hasta alcanzar la posición vertical. Entonces, en esta posición, cada uno de los hilos se encuentra situado en el medio entre los dos polos, y la espira queda retenida. Para que la espira siga girando después de alcanzar la posición vertical, es necesario invertir el sentido de circulación de la corriente. Para conseguirlo, se emplea un conmutador o colector, que en el motor eléctrico más simple, el motor de corriente continua, está formado por dos chapas de metal con forma de media luna, que se sitúan sin tocarse, como las dos mitades de un anillo, y que se denominan delgas. Los dos extremos de la espira se conectan a las dos medias lunas. Dos conexiones fijas, unidas al bastidor del motor y llamadas escobillas, hacen contacto con cada una de las delgas del colector, de forma que, al girar la armadura, las escobillas contactan primero con una delga y después con la otra. Cuando la corriente eléctrica pasa por el circuito, la armadura empieza a girar y la rotación dura hasta que la espira alcanza la posición vertical. Al girar las delgas del colector con la espira, cada media vuelta se invierte el sentido de circulación de la corriente eléctrica. Esto quiere decir que la parte de la espira que hasta ese momento recibía la fuerza hacia arriba, ahora la recibe hacia abajo, y la otra parte al contrario. De esta manera la espira realiza otra media vuelta y el proceso se repite mientras gira la armadura. El esquema descrito corresponde a un motor de corriente continua, el más simple dentro de los motores eléctricos, pero que reúne los principios fundamentales de este tipo de motores.
Motores de corriente alterna
Los motores de corriente alterna tienen una estructura similar, con pequeñas variaciones en la fabricación de los bobinados y del conmutador del rotor. Según su sistema de funcionamiento, se clasifican en motores de inducción, motores sincrónicos y motores de colector.
Motores de inducción
El motor de inducción no necesita escobillas ni colector. Su armadura es de placas de metal magnetizable. El sentido alterno de circulación, de la corriente en las espiras del estator genera un campo magnético giratorio que arrastra las placas de metal magnetizable, y las hace girar. El motor de inducción es el motor de corriente alterna más utilizado, debido a su fortaleza y sencillez de construcción, buen rendimiento y bajo coste así como a la ausencia de colector y al hecho de que sus características de funcionamiento se adaptan bien a una marcha a velocidad constante.
Motores sincrónicos
Los motores sincrónicos funcionan a una velocidad sincrónica fija proporcional a la frecuencia de la corriente alterna aplicada. Su construcción es semejante a la de los alternadores Cuando un motor sincrónico funciona a potencia Constante y sobreexcitado, la corriente absorbida por éste presenta, respecto a la tensión aplicada un ángulo de desfase en avance que aumenta con la corriente de excitación Esta propiedad es fa qUe ha mantenido la utilización del motor sincrónico en el campo industrial, pese a ser el motor de inducción más simple, más económico y de cómodo arranque, ya que con un motor sincrónic0 se puede compensar un bajo factor de potencia en la instalación al suministrar aquél la corriente reactiva, de igual manera que un Condensador conectado a la red.
Motores de colector
El problema de la regulación de la velocidad en los motores de corriente alterna y la mejora del factor de potencia han sido resueltos de manera adecuada con los motores de corriente alterna de colector. Según el número de fases de las comentes alternas para los que están concebidos los motores de colector se clasifican en monofásicos y Polifásicos, siendo los primeros los más Utilizados Los motores monofásicos de colector más Utilizados son los motores serie y los motores de repulsión .
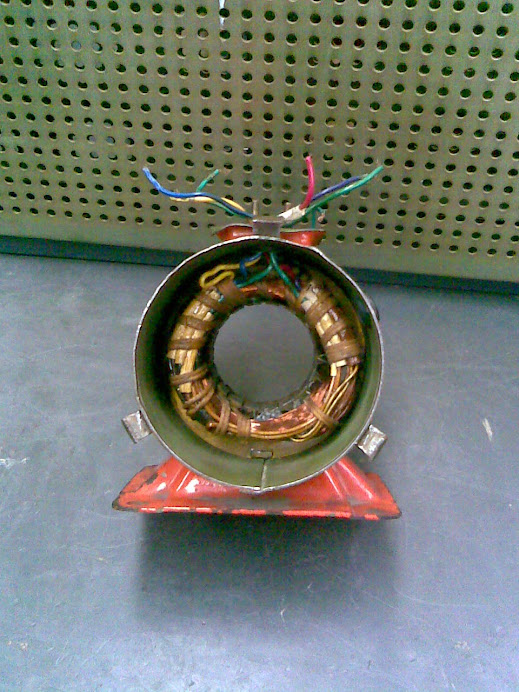
 En esta imagen se observa la conexión de bobinado principal y secundario con interruptor centrifugo
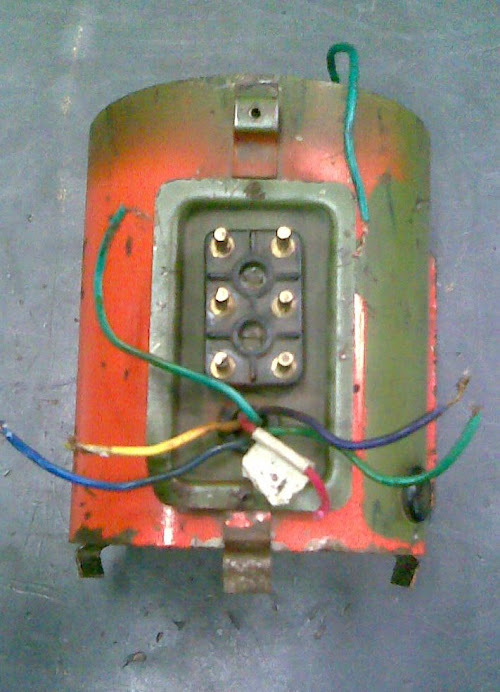
En esta imagen se observa la conexión de bobinado principal y secundario con interruptor centrifugo Esta es la parte frontal del motor donde se encuentra la bornera, y en ella se visualiza el bobinado principal, el bobinado de arranque, el condensador de arranque y el interruptor centrifugado. Los datos que pudimos obtener corriente de arranque, corriente de trabajo, y según los diferentes tipos de conexión elaboramos una tabla.
Esta es la parte frontal del motor donde se encuentra la bornera, y en ella se visualiza el bobinado principal, el bobinado de arranque, el condensador de arranque y el interruptor centrifugado. Los datos que pudimos obtener corriente de arranque, corriente de trabajo, y según los diferentes tipos de conexión elaboramos una tabla.

 En el arranque inicial, cuando la velocidad es cero, la corriente de armadura es limitada unicamente por la resistencia combinada de las escobillas y el devanado (Ra); asi, la corrinte puede alcanzar niveles dañinos. la solucion practica es insertar temporalmete una resistencia en serie con el ciercuito de armadura, para el caso de un motor con excitacion en paralelo.el dem¡nominador de la ecuacion ahora se convierte en Ra+Rst. el valor completo de Rst se selcciona para limitar la armadura a un valos aceptable cuando wm=0.Rst se reduce a cero cuando el valor de la velocidad y , por tanto E aumenta.
En el arranque inicial, cuando la velocidad es cero, la corriente de armadura es limitada unicamente por la resistencia combinada de las escobillas y el devanado (Ra); asi, la corrinte puede alcanzar niveles dañinos. la solucion practica es insertar temporalmete una resistencia en serie con el ciercuito de armadura, para el caso de un motor con excitacion en paralelo.el dem¡nominador de la ecuacion ahora se convierte en Ra+Rst. el valor completo de Rst se selcciona para limitar la armadura a un valos aceptable cuando wm=0.Rst se reduce a cero cuando el valor de la velocidad y , por tanto E aumenta. 2. control de velocidad:
2. control de velocidad:

















{kind=link}
{kind=link}
{kind=link}